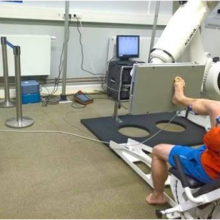
机器人用于在假体植入之前准确放置螺钉或切割/雕刻骨骼。通常,首先将标记固定在患者身上,山西国产协作机器人品牌,以便机器人可以在解剖结构移动的情况下调整其运动。***个标记以相对于末端执行器的已知姿势(机器人的远端位置,如钻或锯)放置在手术器械上。机器人将按照手术前或干预期间实现的计划进行操作。结果的质量主要取决于以下因素:?生态系统的真实性,包括光学系统的准确性、基准技术、标记的几何设计、?配准过程(数字解剖与物理解剖的对齐),?机器人视觉控制回路补偿患者运动的能力,山西国产协作机器人品牌,较低的延迟不仅会提高反馈回路后机器人位置校正的准确性,而且还会使操作更快。结论在构建机器人应用程序时,考虑光学系统的性能很重要。但是,还应考虑机器人结构的实际效率,以及其他组件,如基准技术和标记的几何形状。配准过程也会对整体误差产生很大影响,应予以考虑。,应考虑人体工程学和可用性考虑,山西国产协作机器人品牌,因为机器人在手术过程中肯定需要人工合作。 某种意义上说,智能机器人的升级,是新一轮工业的重要内容。山西国产协作机器人品牌

机器人手术系统是集多项现代高科技手段于一体的综合体。主要用于心脏外科和***切除术。外科医生可以远离手术台操纵机器进行手术,完全不同于传统的手术概念,在世界微创外科领域是当之无愧的性外科手术工具。利用机器人做外科手术已日益普及,美国2004年一年,机器人就成功完成了从***切除到心脏外科等各种外科手术2万例。利用机器人做手术时,医生的双手不碰触患者。一旦切口位置被确定,装有照相机和其他外科工具的机械臂将实施切断、止血及缝合等动作,外科医生只需坐在通常是手术室的控制台上,观测和指导机械臂工作就行了。据悉,该技术可让医生在地球的一端对另一端的患者实施手术。目前普通的机器人外科手术是***切除术。一些外科医生也采用称为“达芬奇”的机器人系统做心脏外科、妇产科及节育手术。2000年,机器人做的外科手术达1500例,而2004年,机器人已实施了2万例手术。
山西国产协作机器人品牌高质量完成可重复的流程,而无需根据类型或工件进行投资;
机械人专家们可以把精力放在机器人该做什么?手和工具应该放在哪?而不是该怎样实现所要求的动作。对于具有很多运动部件的复杂的机械结构,机械手实现一种动作,机械臂可以有不同运动的方法。比如说,人的手臂,手的位置和方向一定时,肘部可以有不同的运动。Actin就是利用这种运动学的冗长性自动生成智能控制,包括避开碰撞,关节角度的限值。能量小运动和抵抗环境外力能力比较好化。通过可设置的面向对象的设计,Actin可以应用于多种机器人。它可以既可以应用于固定式的工业机器人,比如说,工厂自动生产线的机器人。也可以应用于移动式的机器人,如:家庭和娱乐用机器人、协作机器人。Actin适用于很多种型式关节和手部,它可以仿真和控制***个自由度和分支联接的结构。Actin的能力包括:·动态模拟任何台数的机器人·蒙地卡罗(MonteCarlo)仿真分析·模拟柔性关节·视觉演示机器人·控制系统的表达用可扩展标记语言。
通过AI算法和TPU芯片,人类成功重建了果蝇大脑神经元的3D模型。这项成果意味着人类对于脑科学的研究更进了一步。新研究的论文已经发表在《细胞》杂志上。论文:日,谷歌与霍华德·修斯医学研究所(HHMI)珍妮莉亚研究园区(JaneliaResearchCampus)以及剑桥大学展开合作,共同在细胞杂志上发表了论文《AutomatedReconstructionofaSerial-SectionEMDrosophilaBrainwithFlood-FillingNetworksandLocalRealignment》,深入果蝇大脑的所有神经元和突触。为了生成详尽的大脑图像,研究人员使用了多达7062个大脑切片,共计2100万张图片——其背后使用的算法和硬件可谓强大。谷歌AI负责人,计算机大神JeffDean点评了这项研究:TPU带你飞!这一连接组学研究有望加速人类对于果蝇——乃至所有生物学习、记忆和感知方面的研究。目前该成果已开源,人们可以在Neuroglancer上对果蝇的大脑进行3D预览。这项研究的作者之一、Janelia研究组长DaviBock表示:「此前人类从未对果蝇大脑实现神经元连接级别的成像。」这种级别的细节是绘制大脑电路的关键——只有获取***的神经元连接网络,我们才能了解果蝇行为的生成机制。连接组学研究的目标是绘制大脑的「接线图」。 需要灵活快速的生产单元来满足这些需求,并提高制造企业产能和效率,降低成本。
骨科是手术机器人早涉及的领域之一,也是当前手术机器人研发和产业化发展的热点领域。骨科手术机器人主要应用于创伤骨科、脊柱外科和关节外科,其中机器人辅助关节置换手术的普及度相对较高。在日益激烈的竞争格局中,国内企业加大自主研发力度,并获得资本青睐。基于我国庞大的人口基数、社会老龄化进程的加速、质量医疗资源的逐渐下沉,以及在国家人工关节集中带量采购政策的推动下,我国骨科手术机器人市场需求有望大量释放,行业将迎来高速发展。赛道竞争激烈目前,骨科手术机器人领域呈现出多强角力的市场格局。跨国企业布局骨科手术机器人赛道的有史赛克、强生、捷迈邦美、施乐辉、美敦力等。近年来,国内多家企业也进军骨科手术机器人领域,如天智航、微创医疗、威高集团、罗森博特等。其中,以骨科手术机器人为主营业务的天智航是国内该领域的企业;威高集团等多家上市公司近年来不断拓展业务领域,也开始积极布局研发骨科手术机器人。值得关注的是,不同于跨国***以收购方式进行赛道布局,国内骨科手术机器人企业主要通过联合医院、高校和科研机构等,不断加强技术协作,聚焦自主研发。资本关注度高我国骨科手术机器人行业起步较晚; 建设灵活、安全、可快速变化的智能生产线;山西国产协作机器人品牌
1959年,美国人制造出世界上D一台工业机器人;山西国产协作机器人品牌
如何在PST光学定位系统中训练追踪目标物?当追踪目标物粘贴marker之后,PST光学定位系统需要对其进行识别。在主窗口中按“Newtargetmodel”(新目标模型)选项即可选择训练页面(请见下图)。训练是“教”系统识别新追踪目标物的过程,即在PST摄像头前面(追踪范围内)缓慢旋转物体,系统根据marker点的位置关系对其进行识别并建模,然后该模型即可用于追踪交互。训练步骤:1.在目标物上添加四个或多个标记点。将目标物放置在PST工作空间中(无遮挡),该空间里所有其它追踪目标物和反光材料,因为在训练过程中如果有多个物体可能会造成目标物识别错误。该过程可以训练多包含多达100个标记点的单个目标物。2.点击“开始”按钮,下图显示为一个示例训练的片段。灰色点表示被自身遮挡的标记点。3.缓慢而平稳地移动并旋转目标物,以便将所有标记点显示给系统。确保在训练过程中始终保持三个或更多标记点可见。如果没有足够的标记点可见,训练过程将中止,并显示错误对话框。在这种情况下,请关闭错误对话框并重新开始训练操作。如果问题仍然存在,请检查目标物各个角度是否都有足够的标记点可见。当显示的追踪目标物标记点数量和物体上的实际标记点数量一致时。 山西国产协作机器人品牌
位姿科技(上海)有限公司专注技术创新和产品研发,发展规模团队不断壮大。公司目前拥有较多的高技术人才,以不断增强企业重点竞争力,加快企业技术创新,实现稳健生产经营。诚实、守信是对企业的经营要求,也是我们做人的基本准则。公司致力于打造高品质的手术导航,手术机器人,医疗机器人,光学定位仪器。公司力求给客户提供全数良好服务,我们相信诚实正直、***进取地为公司发展做正确的事情,将为公司和个人带来共同的利益和进步。经过几年的发展,已成为手术导航,手术机器人,医疗机器人,光学定位仪器行业出名企业。